Artificial intelligence, also known as machine intelligence, is a discipline that studies the mechanisms of human intelligence and how to use computers to simulate human intelligence activities. After more than 50 years of development, artificial intelligence has formed a very wide range of research fields, and has achieved many remarkable achievements. Intelligent robot technology integrates the high-tech formed by computer, cybernetics, institutional science, information and sensing technology, artificial intelligence, bionics and other multi-disciplines, integrating multi-disciplinary development achievements and representing the forefront of high-tech development. The research of intelligent robots has greatly promoted the advancement of artificial intelligence and technology, and has gradually become a branch field that has attracted much attention. Various intelligent robot competitions have also become a competitive project widely promoted and developed at home and abroad.
In order to realize the high-speed and accurate walking of the robot according to the specified path, the CPU of the robot is required to quickly read the values ​​of the plurality of sensor ports in real time, and complete the tasks of storing, calculating, and outputting the values ​​of the respective ports in a short time. Because the embedded microprocessor has strong support for real-time tasks, can complete multi-tasking and has a short interrupt response, the controller with embedded microprocessor ARM9 as the core is adopted in the design process, and the Harvard structure is adopted inside. , can execute 110 million machine instructions per second. The design also sets up 4 PWM control signal output ports to drive 4 high-power DC motors to achieve precise adjustment of the speed. In addition, 7-channel Do digital output ports are also provided to drive the servo motor and buzzer. , relays, LEDs, etc. In order to provide more execution space for large and complex programs, the design additionally has 100 KB of data memory (RAM) and 512 KB of program memory (Flash ROM) to store more data and commands.
Power and drive circuit design
Power supply and sampling circuit
The power supply is a key component to ensure the stable and reliable operation of the robot, which directly affects the performance of the robot. Since the robot motor drive and the controller use two different voltage sources, in order to avoid mutual interference between the two power supplies, the robot uses a dual power supply system: the motor power supply uses a high discharge rate polymer lithium battery, and the capacity is 2 500 MAH. The working voltage is 24 V, which can provide 40 A stable supply current, which is 10 times that of ordinary batteries. The controller power supply uses 8.4 V lithium battery and provides voltage sampling port for battery detection. The circuit diagram is shown in Figure 2.
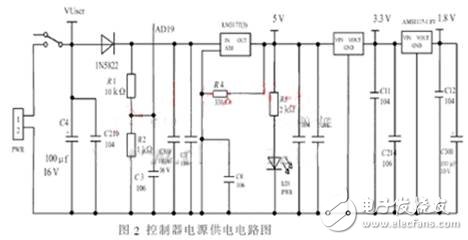
In order to obtain the different levels of voltage required by each port of the CPU, this design uses an LM317T three-terminal regulator and two AMS1117 low-dropout linear voltage regulators, and through its auxiliary circuit, it is accurate and stable 5 V, 3.3. V, 1.8 V three voltages; use one LED LD1 and current limiting resistor R5 as the power indicator to show the status of the power switch; to sample the power supply voltage in real time, prevent the lithium battery from over-discharging or over-charging, through R1 in the design The R2 dividers the AD19 port as the power sampling port.
DC motor drive circuit
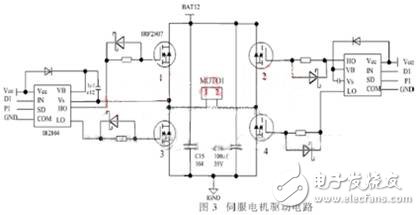
Due to the needs of competitive games, robots need to increase the speed as much as possible while avoiding collisions, thus requiring drivers with more power and more sensitive control methods. For this purpose, the motor drive power supply voltage is 16.8 V and the current is 20 A. The DC motor is controlled by 4 PWM signals with a duty cycle range of 0 to 95% to achieve precise speed regulation.
Due to the large motor power and the requirement for bidirectional and adjustable speed operation, this paper designs a half-bridge power MOSFET to successfully control the motor. As shown in Figure 3, the two PWM signals are connected to the MOSFET of model IRF2807 through the IR2104 half-bridge driver and the corresponding protection circuit to control the on and off of the connection between the power supply and the motor to control the speed of the motor. purpose. When the duty cycle of the PWM signal is large, the line conduction time is long and the motor speed is large; on the contrary, when the PWM duty ratio is small, the line conduction time is short and the motor speed is small. The four MOSFET tubes are turned on and combined at different times to control the direction of motor rotation: when the MSFET tubes 1 and 4 are turned on, the motor port 1 is positive, 2 is negative, and the motor is rotating forward; when the MOSFET tubes 2 and 3 are turned on Motor port 2 is positive, 1 is negative, and the motor is reversed.
Far infrared flame sensor group
In order to complete the fire fighting mission, the robot must be able to determine the approximate position of the flame and make a judgment as to whether the flame is extinguished. In this paper, two far-infrared flame sensor groups consisting of 28 infrared receiving tubes are designed. Each of the front and rear has 14 infrared receiving tubes. Each 2 parallels and refers to the same direction. The two sensor groups point to 14 in total. Direction can cover 360° range. As shown in the figure, 14 ports are connected to the ATMEGA8-16PC microcontroller through the CD4051 octal switch, where SCK, MISO, and MOSI are bit selection ports. In addition, the design can also compare the 14-channel read data to determine its maximum and minimum values ​​and corresponding port values, which is convenient for determining the fire source orientation.
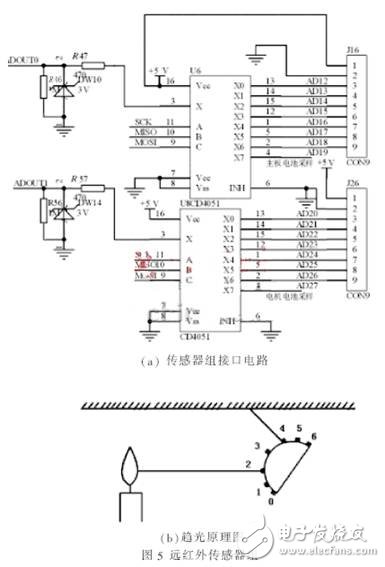
By comparing the different port values ​​of the far-infrared sensor group, the relative position of the robot and the fire source can also be determined to determine the direction of advancement and complete the phototaxis action. When the relative position of the robot and the fire source is as shown in Fig. 5(b), the values ​​of port 2 and port 4 can be read and the difference is made. If the value of port 2 is greater than port 4 (the description 2 is closer to the fire source), then Execute the left turn command to make the difference within a certain range, and then execute the straight command to approach the fire source.
Ground gray sensor
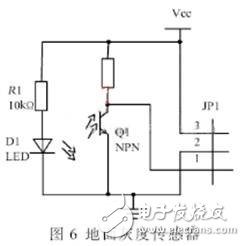
According to the competition, the starting position of the robot is a white circle with a diameter of 30 cm. Each room has a white line with a width of 3 cm and the other floors are black. The start and stop of the robot and the sign of entering the room depend on the judgment of the gray level of the ground. Therefore, it is necessary to use a sensor that can respond to the intensity of the reflected light on the ground. This machine uses a pair of ground grayscale sensors placed on the bases at the front and rear ends. The darker the ground, the larger the value, and the lighter the ground, the smaller the value.
As shown in FIG. 6, the ground grayscale sensor illuminates the ground through the LED, and the reflected light of the ground is received by the phototransistor. When the color of the local surface is black, the reflected light is relatively weak, and the base current of the phototransistor is smaller. The collector current is also relatively small, the 1-port voltage value is higher, and the measured value is larger; when the local surface is white, the reflected light is stronger, the collector current is larger, the 1-port voltage value is smaller, and the measured value is also Smaller.
This paper researches and designs an intelligent fire extinguishing robot based on ARM9 embedded system, which has the following five innovations: (1) The embedded system core is adopted, which greatly improves the ability of the robot to process signals; (2) Dual power supply system Introduced to make the operation of the robot more stable and reliable; (3) Using PWM signal to control high-power DC motor, great improvement in speed and accuracy; (4) Reasonable selection of the number and placement of PSD ranging sensor It not only meets the requirements of the competition, but also saves costs; (5) The far-infrared flame sensor group designed in this paper has completed the precise positioning task of the fire source, and improved the reliability and rapidity of fire extinguishing. The actual test proves that the robot designed in this paper can complete the game task well, and has a great improvement in reliability and speed, and has a strong application value.
400 puffs disposable vape pen are so convenient, portable, and small volume, you just need to take them
out of your pocket and take a puff, feel the cloud of smoke, and the fragrance of fruit surrounding you. It's so great.
We are China's leading manufacturer and supplier of disposable vape puff bars, 400 puff disposable vape,400 puffs vape and smoke,
400 puffs vape kit,400 puffs e-cigarette, and e-cigarette kit, and we specialize in Disposable Vapes, e-cigarette vape pens, e-cigarette kits, etc.
400 puff disposable vape,400 puffs vape and smoke,400 puffs vape kit,vape pen 400 puffs,400 puffs e-cigarette
Ningbo Autrends International Trade Co.,Ltd. , https://www.vapee-cigarettes.com