The drone system is almost infiltrated into all areas of the battlefield space with its flexible, long-lasting flight and “zero casualtiesâ€. The outstanding performance of drones in several recent local wars has aroused the great attention of the military, especially the military powers, and has become a key node and an important component of the information weaponry system, in information support, information confrontation and firepower. Fields such as combat play an irreplaceable role.

Compared with manned aircraft, the advantages of drones are mainly reflected in the following five aspects:
First, the air mission can be performed for a long time;
The second is to replace the manned aircraft into the polluted environment such as nuclear/raw/chemical;
Third, there are no pilot casualties, and political and military risks are small;
Fourth, because it does not consider human factors, it can withstand greater loads, and the stealth and maneuverability of the aircraft can achieve a qualitative leap;
Fifth, the life expectancy is low and the cost of combat is high. Compared with satellites, drone systems have the advantages of timeliness, pertinence and flexibility.
The status and role of drones
UAVs are a useful tool for capturing information rights
The drone can provide long-lasting battlefield information support services, real-time access and battlefield information, multi-dimensional integration, global coverage, continuous real-time, accurate and precise information sensing capabilities; different types of different altitudes of the UAV system form a coverage battlefield Information support networks such as communication, navigation and positioning from low-altitude to near-space areas form flexible, mobile, multi-level, three-dimensional space-based and near-sky-based integrated information support capabilities, improve command efficiency, and enhance joint operations. Sex and flexibility.

UAV is an important pillar of future battlefield information confrontation
Information confrontation refers to the implementation of electronic interference, spoofing, electronic decoys, cyber attacks, and anti-radiation destruction of enemy information systems. Different types of UAV systems can meet the needs of strategic, campaign, and tactical multi-level information confrontation capabilities, and can provide "soft" and "hard" different types of information countermeasures, providing tactical information confrontation support to strategic battle information confrontation. The combat capability enables the full-band, full-time, and all-weather information attacks on the enemy information system to form a multi-level information warfare strength system framework.
UAVs will become the dominant force in air operations
The UAV will be equipped with the ability to detect time-sensitive targets, the ability to accurately strike important targets in the enemy's depth, the ability to approach space and the capabilities of trans-atmosphere operations, and become the leading force in air operations in the 21st century. In joint operations, unmanned combat aircraft can perform air defense suppression missions, coordinate various forces to strike deep into enemy territory; UAVs cooperate with ground and sea forces to indicate targets and implement firepower for ground and sea weapons, Improve the accuracy of the strike; the drone can also perform combat assistance, battlefield management, theater missile defense, anti-thunder, psychological warfare, and so on.

Drones are the best choice for performing the most dangerous tasks
The use of precision-guided weapons in high-tech information warfare is increasing, nuclear, biological and chemical weapons coexist, and the lethality is increasing. The combatants will face great danger. Therefore, drones can replace human-machines to perform the most dangerous tasks, and to minimize casualties.
The technical basis of the drone
The development of aviation technology is the basis for promoting the development of drone technology . UAVs are aircraft that rely on aerodynamic bearing to fly. How to make UAVs operate stably and reliably, and the performance is getting better and better, which depends on the application and development of aviation technology.
Aviation technology includes aerodynamics, aerodynamics, aerospace structural technology, aerospace materials technology, aero-engine technology, flight control and navigation technology, avionics and electrical technology, etc. Early aviation technology development mainly solved the flight of aircraft such as drones. The problem, the development of modern aviation technology, promotes the development of drones in the direction of increasingly higher flight performance, better flight reliability, and more and more ability to perform tasks.
The development of wireless data link technology is the condition for promoting the development of usable and practical UAVs. Since the drone is unmanned on board, it must rely on the ground control station to realize its control and flight state monitoring through the wireless data link. Therefore, the wireless data link is a condition for promoting the availability and practical use of the drone. The development of modern data link technology has made the UAV data link develop in the direction of high speed, broadband, confidentiality, anti-interception and anti-interference ability, and promote the practical ability of drones.
The main key technologies for the development of drones
In the future, drones will develop in a higher, faster, farther, more mobile, and more efficient manner. The key technologies required are:
1. Platform technology (comprehensive layout, pneumatic, lightweight structure, stealth);
2. Large-size composite material design (standard), processing technology (cost);
3. Structural composite materials, anti-UV materials, lightweight materials, high temperature resistant materials, etc.;
4, micro-machining assembly technology, the application of intelligent materials (no rudder flexible wing, micro, bionic drone);
5. Advanced emission recovery technology;
6. Miniaturization and integration of weapons and equipment;
7. Stealth technology;
8. Power technology;
9. Communication technology;
10. Intelligent control technology;
11. Airspace management technology;
UAV flight control technology
The flight control and management system is one of the key systems of the drone. The flight control system is the core system of the whole flight process of the drone to complete take-off (emission), air flight, mission execution, landing and landing (recycling), and realize full authority control and management of the drone, so the drone is Function and performance play a key and decisive role. Without a flight control system, modern drones would not be able to fly and complete various missions.
The drone flight control system generally includes three parts: the sensor, the onboard computer and the servo actuating device.
Drone control mode
The flight control system of the drone is full-time and full-right. The flight control mode can be divided into program control (time program control), remote control (controlled by ground station remote command) and autonomous flight control (2D, 3D or 4D). Three kinds.
The first two flight control methods are often used for flight control of drones such as drones and observations, and the third is commonly used for flight control of reconnaissance aircraft, attack aircraft and other types of drones.
In the remote control mode, the ground operator controls the flight of the drone according to the state information and mission requirements of the drone;
In the autonomous control mode, the flight control system automatically controls the flight of the drone based on the aircraft state information and mission planning information acquired by the sensor.
In the semi-autonomous control mode, the flight control system autonomously controls the flight of the drone based on the aircraft state information and mission planning information acquired by the sensor, and receives the remote command of the ground control station to change the flight state.
Airborne sensor
The sensors commonly used in UAV flight control systems include angular rate sensors, attitude sensors, heading sensors, altitude airspeed sensors, aircraft position sensors, angle of attack sensors, and overload sensors. The selection of the sensor should be based on the actual system control needs, based on the preliminary design and simulation of the control law.
1. Angular rate sensor
The angular rate sensor is one of the basic sensors of the flight control system. It is used to sense the angular velocity of the unmanned aircraft around the body axis to form angular rate feedback, improve the damping characteristics of the system and improve stability.
The choice of angular rate sensor should consider its measurement range, accuracy, output characteristics, bandwidth, and so on.
The angular rate sensor should be installed near the center of gravity of the drone, at the node of the first-order bending vibration. The installation axis is parallel to the axial direction of the body to be felt, and pay special attention to the correctness of the polarity.
2, attitude, heading sensor
The attitude sensor is used to sense the pitch and roll angle of the drone, and the heading sensor is used to sense the heading angle of the drone. Attitude and heading sensors are an important part of the UAV flight control system and are used to achieve attitude heading stability and control functions.
The choice of attitude and heading sensor should consider its measurement range, accuracy, output characteristics, dynamic characteristics and so on.
The attitude and heading sensor should be installed near the center of gravity of the aircraft. The vibration should be as small as possible and have high installation accuracy requirements.
For magnetic heading sensors to be installed where the influence of ferromagnetic substances is minimal and relatively fixed, the mounting parts shall be made of non-magnetic materials.
3, height, airspeed sensor (or atmospheric data computer)
The altitude and airspeed sensors (or atmospheric data computers) are used to sense the flying height and airspeed of the drone and are essential sensors for maintaining altitude and airspeed. General and airspeed tubes and vent lines constitute an atmospheric data system.
The choice of height and airspeed sensors mainly considers the measurement range and measurement accuracy. The installation is generally required to be near the airspeed tube to minimize the pipeline.
4, aircraft position sensor
The aircraft position sensor is used to feel the position of the aircraft and is a necessary prerequisite for flight path control. Inertial navigation devices, GPS satellite navigation receivers are typical position sensors.
The choice of aircraft position sensors generally takes into account issues such as navigation accuracy, cost and availability associated with flight time.
Inertial navigation devices have installation positions and high installation accuracy requirements. The installation of GPS receivers should mainly avoid antenna occlusion problems.
Boot device
Precise guidance is the basis for automatic landing of drones. Due to the use of a simple airport, it is obviously not possible to use a general instrument landing system or a microwave landing system. Under this premise, there are also the following methods to choose from.
1) Global Positioning System (GPS): GPS is the navigation facility with the highest positioning accuracy so far, and it is widely used in countries all over the world. GPS must be combined with INS and radio altimeter as a precision approach landing guidance system. Because GPS is easily restricted by the United States, it should not be over-reliant.
2) Regional Positioning System (RPS): The Regional Positioning System (RPS) achieves the positioning of air targets by placing 4 to 6 devices (called pseudolites) that are functionally equivalent to positioning satellites in a certain area of ​​the ground.
3) Ground-assisted guidance facilities: locate the aircraft through the precision optical system or guided radar on the ground, and then transmit the positioning information to the flight control computer by the uplink data link.
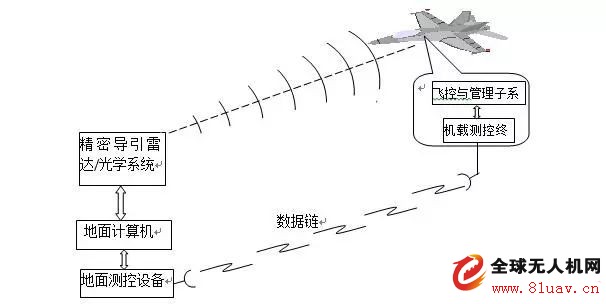
4) Viewing and guiding: using the photoelectric equipment on the drone (which should be locked at a certain angle at this time), the scene of the real-time shooting is superimposed on the attitude, heading, airspeed, altitude and other information of the drone, forming a similar machine. The flat screen, combined with the visual results of the airport personnel for the drone, manually guided the aircraft into the landing.
Servo mechanism
The servo actuating device, also called the steering gear, is the executing part of the flight control system. Its function is to receive flight control commands, perform power amplification, and drive the rudder surface or engine throttle damper deflection to achieve the purpose of controlling the attitude and trajectory of the drone.
The servo actuating device can be divided into an electric servo actuating device, a hydraulic servo actuating device and an electrohydraulic hybrid servo actuating device. Electric servo actuators are commonly used on drones.
Flight control law
The flight control law is an important part of the flight control system. It is a mapping relationship between instructions and various external information to the various actuators of the aircraft. The design of the flight control law is to determine this mapping relationship so that the aircraft has the flight quality that meets the system requirements throughout the flight envelope. The basis of the flight control law design is the system development task contract and related top-level technical documents. According to these documents, the various qualities or performances of the aircraft under the control system are formed. Based on the analysis of the characteristics of the uncontrolled aircraft, the preliminary control law structure is determined to achieve the required flight quality or performance, and then applied. The design method of the automatic control specifically determines the control law parameters. Verify or adjust the control law structure and parameters through nonlinear full-scale simulation, semi-physical simulation and flight test to achieve flight quality or performance. The control law design process is an iterative regression process.
Control law structure
First of all, the control surface of the aircraft should be clarified. The general control surface consists of elevators, ailerons, rudders, flaps, canards, and speed brakes. The control law structure is determined according to the performance requirements of the drone and the characteristics of the unmanned drone. The control law includes a longitudinal control law and a lateral travel control law. According to the mission requirements of the drone, select the following control law structure.
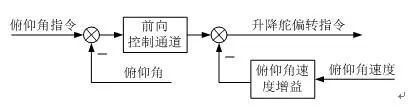
Pitch angle stability and control
The pitch angle stability and control loop generally require pitch angle and pitch angle speed feedback signals, and the general control law structure is shown in the figure.
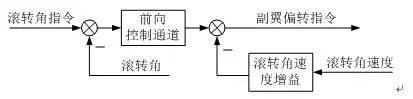
Roll angle stability and control
Rolling angle stability and control loops generally require roll angle and roll angular speed feedback signals. The general control law structure is shown in the figure.
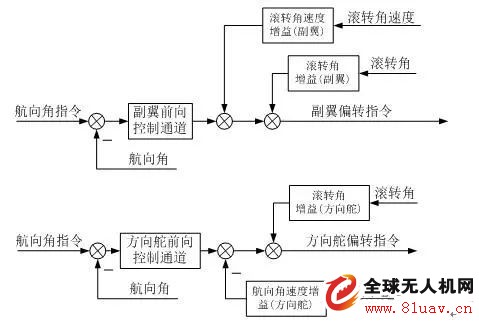
Heading stability and control
The general structure of the heading angle stability and control is shown in the figure. Among them, the control structure is controlled by the aileron for heading control, which has high control efficiency, but the control side has a large slip angle; the rudder is used for heading control, the control efficiency of this form is low, and the introduced roll angle feedback is used for part Eliminate the side slip angle; use the aileron and rudder to jointly control the heading angle, featuring high control efficiency and small side slip angle.
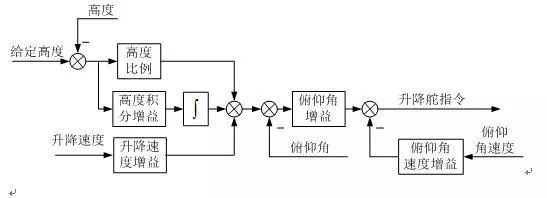
Height control
The height control consists of a pitch inner loop and an outer loop. The pitch inner loop is generally composed of pitch angle and pitch angle speed feedback. The height controlled outer loop is generally in the form of proportional + integral + differential, as shown in the figure.
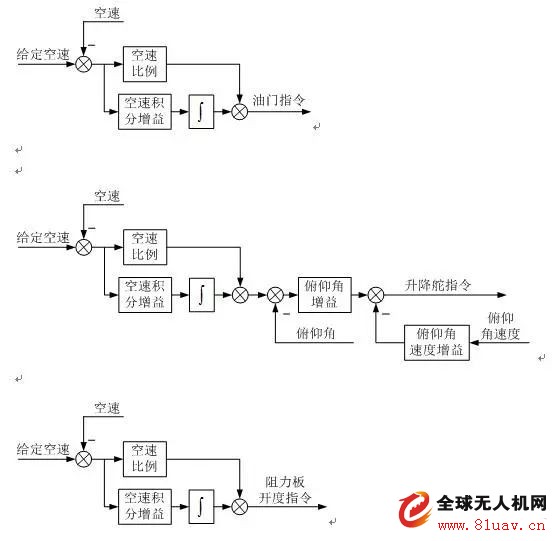
Airspeed control
The airspeed control is divided into a throttle airspeed control, a pitch airspeed control, and a resistance airspeed control. The damper airspeed control realizes the airspeed control by adjusting the engine throttle. The pitch airspeed control changes the aircraft's angle of attack through the elevator deflection, thereby changing the airspeed control of the aircraft. The resistance airspeed control is changed by the deflection of the resistance plate. Resistance achieves airspeed control.
Since the engine generally has a large time delay, the throttle airspeed control is generally relatively slow, and the pitch airspeed control and the resistance airspeed control have relatively fast response characteristics.
Lateral deviation control
Lateral deviation control enables lateral track control. Lateral deviation control is generally achieved by the roll control of the aircraft, which consists of a roll inner circuit and a side outer circuit. The lateral offset distance is the distance from the desired route, that is, the difference between the desired route and the actual route. Differential control is generally used in the cruise flight phase, and no-difference control is mainly used in the precise control phase, such as landing.

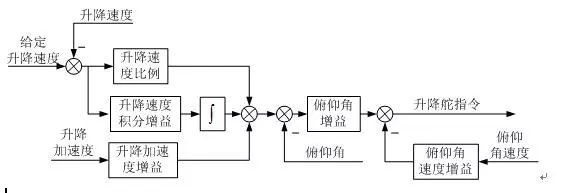
Lifting speed control
The lifting speed control is generally used for the leveling stage of the automatic wheel landing, and its control structure is composed of a pitch inner loop and a lifting speed outer loop, as shown in the figure.
UAV data link technology
The data link is one of the main components of the UAV system. The design involves multiple remote control telemetry, tracking and positioning, image transmission, microwave communication, satellite communication, anti-jamming communication, antenna servo, automatic control and computer applications. It is a complex information system project.
Data link function
1. Remote control of drones and airborne mission equipment;
2. Telemetry of drones and airborne equipment;
3. Tracking and positioning of drones;
4. Real-time transmission and processing of reconnaissance information of drones.
Remote control technology
Remote control is a must-have feature of the UAV data link for remote operation of drones and mission equipment. Commands and data from the ground console or manipulator are coded, uplink (measured to the drone) wireless channel transmission and decoding, and sent to the flight control computer (or directly) to operate the drone and mission equipment.
In modern advanced UAV systems, the role of remote control can be summarized as follows:
1. Long-distance manipulation of drone flight;
2. Long-distance control of airborne equipment of drones;
3. Transmission of uplink ranging code;
4. Uplink transmission for data for drone navigation (including route setting or modification data, position of measurement and control station, location of drone measured by measurement and control station, differential GPS correction data, etc.).
Remote control is very important for drones, and its reliability, anti-jamming and anti-interception capabilities should be fully considered. The transmission of remote commands and data is typically performed at a lower code rate, and it is not difficult to ensure adequate channel levels. Increasing the design margin can increase the reliability of the remote control. The spread spectrum or frequency hopping and data encryption can increase the anti-interference and anti-interception ability of the remote control.
Telemetry
Telemetry is the necessary monitoring tool to understand the state of the drone and to implement remote control. Telemetry data from the flight control computer or directly from all parts of the aircraft (including the data of the flight state sensor and the detection data of the state of the onboard equipment), encoded, downlink (UAV to measurement and control station) wireless channel transmission and decoding, transmission Returning to the monitoring station, through the comprehensive display of data, it is possible to observe the flight status of the drone and the working status of the mission equipment in real time. With this data, the operator can easily manipulate the drone and its mission equipment to complete various tasks. With the aid of the downlink telemetry channel, it is also possible to track the antenna of the monitoring station to the drone and measure the azimuth of the drone. The distance measurement code transmitted by the telemetry is compared with the transmitted ranging code, and the slant range measurement of the drone relative to the measurement and control station can be completed. From the azimuth and slant distance, and then using the height data returned by the telemetry, the position of the drone relative to the monitoring station can be determined.
In modern advanced UAV systems, the role of telemetry is:
1. Various flight status data of the downlink transmission drone;
2. Downstream transmission of the onboard equipment status data of the drone;
3. Downlink transmission ranging code to realize ranging of the drone;
4. Provide the beacon of the measurement and control station to track the angle measurement.
Telemetry is also very important for drones. Errors in data transmission can be misleading to the operator and can lead to accidents due to misuse. The design of UAV telemetry should pay attention to the quality of data transmission. The telemetry data rate may be similar to or slightly higher than the remote control data, and it is not difficult to ensure sufficient channel level. Usually, error correction coding and other measures are taken to improve the transmission quality of telemetry data.
Tracking and positioning technology
Tracking positioning refers to providing the location data of the drone continuously and in real time. This is both a requirement for maneuvering drones and a need to locate reconnaissance targets.
For the unmanned aerial vehicle capable of autonomous flight, the on-machine navigation and positioning data can be transmitted back to the measurement and control station in real time by using telemetry, so that the tracking and positioning of the drone can be realized. However, in some cases where it is not possible to rely entirely on on-board navigation and positioning, it is necessary to measure and measure the drone by the monitoring station, determine the relative position of the drone and the monitoring station, and then combine the position of the monitoring station itself. Tracking and positioning of the drone can be realized. Sometimes the on-board navigation positioning data and the measurement station measurement data can be fused. This combined positioning method not only increases the redundancy, but also improves the positioning accuracy.
For long-distance flying drones, the monitoring station antennas generally use high-gain directional antennas. In this way, it is beneficial to increase the signal level and to improve the anti-interference ability of the downlink channel. If the high-gain directional antenna can automatically track the drone, that is, it has the ability to track and measure the angle, then the tracking function can be achieved by combining the ranging function.
Since the flying height of the drone is relatively low, the drone's elevation angle to the monitoring station is small, and the drone itself is mostly equipped with a height sensor, so in most cases, it is not necessary to measure the pitch angle, and the pitch direction is manually or digitally guided. Tracking is complete, which helps reduce the complexity of the system.
Information transmission technology
The drone information transmission is to transmit the video reconnaissance information acquired by the onboard mission sensor to the measurement and control station through the downlink wireless channel. Video reconnaissance information is divided into two types: image reconnaissance and electronic reconnaissance. The signal form of image reconnaissance information differs depending on the type of image sensor, and there are analog or digital television signals of a television camera, and image data signals of an imaging radar or a line-scan camera. The electronic reconnaissance information is a band-limited analog signal.
Information transmission is the key to the reconnaissance mission of the UAV system. The quality of transmission is directly related to the ability to discover and identify targets. Reconnaissance information requires a much higher transmission bandwidth than the remote and telemetry data (typically a few megahertz, up to tens of megahertz, or even hundreds of megahertz). Therefore, video reconnaissance information transmission channel design is often the most difficult part of UAV wireless channel design. In order to simplify the system, video information transmission and telemetry can share one channel.