Figure 1 presents the block diagram for an 8751 microcontroller controlling a DC brushless motor. The P1 port of the 8751 microcontroller is linked to a 7406 inverter, which is responsible for switching the DC brushless motor. The P2 port is utilized to read signals H1, H2, and H3 from the position sensor. Meanwhile, the P0 port is connected to a digital-to-analog converter.
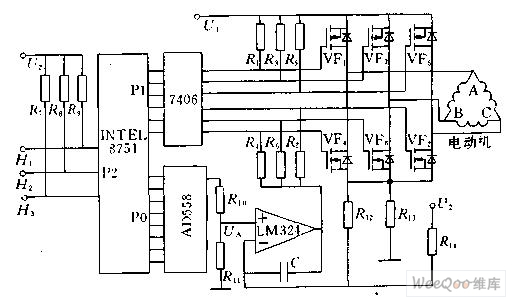
Figure 1: Schematic Diagram of Computer-Controlled DC Brushless Motor
Commutation Control
Based on the stator winding commutation mode, the states of the three rotor magnet position sensor signals H1, H2, and H3 are first determined. The relationship between the six power transistors is stored in tabular form within the EEPROM of the microcontroller. By referencing the states of H1, H2, and H3, the corresponding power transistor can be identified and sent out via the P1 port, enabling the commutation of the DC brushless motor.
Starting Current Limitation
A resistor R13 is inserted in series into the main circuit. Thus, Uf = R13 * IM, where the magnitude is directly proportional to the motor's current IM. The output voltage U0 of Uf and the digital-to-analog converter is sent to the two input terminals of the LM324 operational amplifier. When the feedback voltage exceeds Uf compared to the given signal U0 from the digital-to-analog conversion, the LM324 outputs a low level, preventing the three power transistors VF4, VF6, and VF2 from turning on, thereby cutting off all current paths of the stator winding of the DC brushless motor and forcing the motor current to decrease. Once the current drops below Uf compared to U0, the LM324 output returns to high level, allowing the main circuit to conduct again, effectively limiting the current.
Speed Control
In the normal operation of the DC brushless motor, the motor's current can be controlled by regulating the output voltage U0 of the digital-to-analog converter, thereby controlling the motor's current. This means that the 8751 microcontroller calculates the rotational speed of the motor through the period of the sensor signal and compares it with the given rotational speed. If it exceeds the given rotational speed, the output value of the P2 port is reduced, decreasing the motor current and reducing the rotational speed. Conversely, the output value of the P2 port is increased, thus raising the motor's rotational speed.
PWM Control Implementation
Speed control can also be achieved through PWM. Figures 2 and 3 illustrate the control of the DC brushless motor speed using PWM.
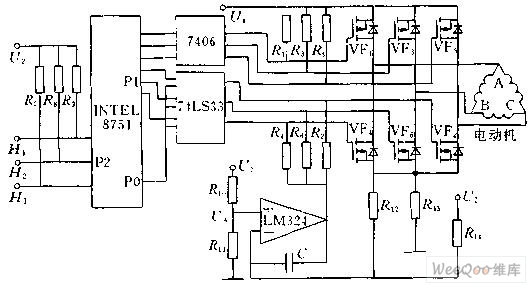
Figure 2: PWM Control Diagram
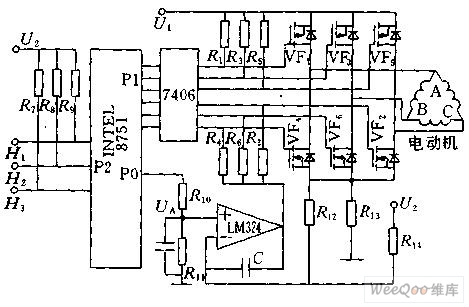
Figure 3: PWM Control Diagram
The forward and reverse rotation of the brushless DC motor can be achieved by altering the commutation sequence. This is accomplished simply by replacing the commutation control table.
Perkins 201-400KW Diesel Generator
201-400KW Diesel Generator,Perkins Soundproof Generator,Perkins Super Silent Type Diesel Generator,Perkins Super Silent Power Generator
Shanghai Kosta Electric Co., Ltd. , https://www.generatorkosta.com