1 Introduction
Disasters often lead to significant property damage and pose serious threats to human safety. Timely access to information from the disaster site, combined with immediate response measures, can greatly reduce the impact of such events and help protect lives and assets. This project aims to develop an interactive intelligent robot based on the PIC32 microcontroller, which is designed for use in various disaster scenarios. The system features flexible peripheral configurations, allowing it to be adapted for other applications such as industrial automation, environmental monitoring, and smart community management.
2 Demand and Function Analysis
To create an interactive intelligent robot, users should be able to remotely control the device via wireless communication through a PC. The main requirements include:
1. Upon power-on or reset, the upper computer program and lower controller configuration should automatically initialize and operate normally.
2. Users should be able to send commands from the PC at any time, requesting the lower unit to return environmental data such as temperature, humidity, and panoramic images.
3. On the PC side, users should be able to view and respond to the sensor data provided by the lower unit.
4. Based on the panoramic image data, users should be able to reconstruct the scene and plan appropriate actions, such as defining the robot's movement path or response strategy.
3 Related Technologies and Principles
Host Computer Programming
The host software is developed using Visual C++ 6.0. It utilizes API functions and MSComm controls to establish communication between the PC and the robot. This allows for real-time interaction and data exchange.
Wireless Communication
The system employs the nRF24L01 wireless transceiver module, which operates in the 2.4–2.5 GHz ISM band. This single-chip solution includes a frequency generator, enhanced mode controller, power amplifier, crystal oscillator, modulator, and demodulator. It supports SPI interface for configuration, enabling settings for output power, channel selection, and protocol parameters.
The nRF24L01 is known for its low power consumption—9.0 mA in transmit mode at -6 dBm and 12.3 mA in receive mode—making it ideal for battery-powered devices.
4 System Design and Implementation
The overall system architecture is illustrated in Figure 1:
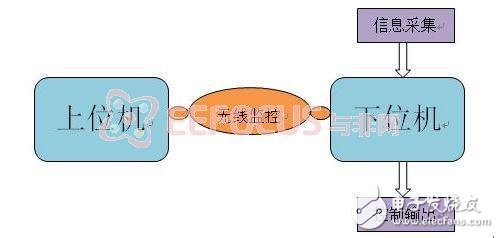
Figure 1: System Overall Structure Block Diagram
This design integrates hardware components like the PIC32 microcontroller, wireless communication module, and sensors, while the software handles user interaction, data processing, and control logic. The system is built to be modular, scalable, and adaptable for different application scenarios beyond disaster response.
DC Capacitor For Electric Furnace
DC Capacitor For Electric Furnace
DC Capacitor For Electric Furnace,DCMJ DC Filter Capacitors,DCMJ Pulse Capacitors,DCMJ DC Support Capacitors
YANGZHOU POSITIONING TECH CO., LTD. , https://www.yzpst.com