In recent years, the issue of energy conservation in automobiles has attracted much attention, and eliminating unnecessary energy losses is a very effective method. At present, most vehicles still need to use some functions after the ignition key has reached the OFF position, such as vehicle security and electronic parking functions. In order to reduce the power consumption and prevent the car from starting due to excessive battery power consumption, the KL30 node can enter the low-power state after the OFF file, shutting down most of the unnecessary functions and minimizing the power consumption. For distributed functional networks, each node follows the same protocol because the nodes connected to the bus need to work together
In recent years, the issue of energy conservation in automobiles has attracted much attention, and eliminating unnecessary energy losses is a very effective method. At present, most vehicles still need to use some functions after the ignition key has reached the OFF position, such as vehicle security and electronic parking functions. In order to reduce the power consumption and prevent the car from starting due to excessive battery power consumption, the KL30 node can enter the low-power state after the OFF file, shutting down most of the unnecessary functions and minimizing the power consumption. For a distributed function network, since the nodes connected to the bus need to work cooperatively, each node follows the same protocol to achieve synchronized sleep and wake-up.
Currently, most vehicles comply with OSEK or AUTOSAR network management protocols to implement node dormancy and wakeup functions. As the electrical and electronic systems of vehicles are becoming more and more complex, KL30 nodes are more and more, and the current network management protocols gradually show some drawbacks. For example, when IG OFF, when a function requires one node on the bus to communicate with another node, all nodes on the network segment need to be woken up. If the function is across network segments, all nodes on both network segments need to be awakened. The irrelevant nodes all enter the non-low-power state, thus causing unnecessary power consumption. For another example: To ensure vehicle safety, some nodes need to communicate for a period of time after the ignition key goes to the OFF position, which is usually several minutes to several tens of minutes. At this time, due to the communication requirements of some nodes, all nodes on the network segment need to communicate. Can not enter the low-power state, greatly consuming battery power.
In order to solve this problem, some auto manufacturers in Europe have begun to develop a new network management solution - ParTIalnet (PN) management to achieve group sleep and wake-up.
Local network management conceptDifferent from the logic of sleeping in the same way as traditional network management, local network management divides multiple virtual local networks within the entire network according to different electrical and electronic EE features, and separate sleeping wake-up functions can be implemented between local networks. Does not affect each other. As shown in FIG. 1, according to the EE feature, a plurality of nodes on the network are divided into 2 PN groups. The PN1 group is a door unlock related feature, and the PN2 group is a Radio related feature. After the ignition key is in the OFF position and all nodes are in the sleep state, the PEPS needs to unlock the door. At this time, the PEPS needs to wake up the BCM and IC related to the unlocking function. Other nodes that are not related to the function remain in a sleep state.
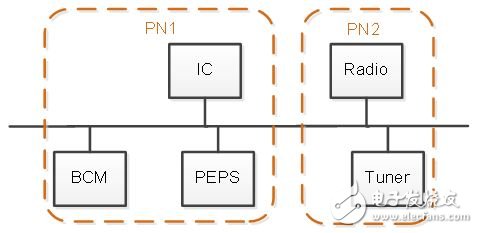
Figure 1 Example of a local network
1) Wake-up logic: A node is only woken up if it receives a specific message (usually a network management message) within its own PN group. The NM message sent by the PEPS can only wake up the IC and BCM, while Radio and Tuner are still in sleep state.
2) Sleep logic: After all the nodes in the PN group to which the node belongs satisfy sleep conditions for the PN, the nodes in the PN group achieve coordinated sleep. Node communication in other PN groups is not affected.
Therefore, according to the function of dividing the local network, when a function is activated, only relevant nodes can be awakened and communicated, while other nodes can still maintain a sleep state, which greatly reduces power consumption. The division of the PN group is very flexible. It can not only group the nodes on the same network segment, but also divide the nodes of the cross-network segment into the same PN group. In addition, one node can belong to one or more PNs.
Local network managementCompared with the traditional CAN communication hardware and software implementation, partial network management needs to achieve the following parts:

In the CAN bus, messages are sent in broadcast mode. When the node is in the dormant state, most transceivers will wake up the nodes when they detect the messages in the bus. This will invalidate the local network functions of network management.
To achieve the function of partial node wakeup, special transceiver support is required. Special transceivers have a message filtering function that can only be woken up after receiving a specific message. NXP has taken the lead in introducing transceivers TJA1145 and UJA1168 that support local network management. The TJA1145 is a high-speed CAN transceiver and the UJA1168 is a CAN system based chip that integrates a 5V/100mA microprocessor.
In addition to the TX and RX pins of traditional transceivers, NXP's two PN-capable transceivers are connected to the CAN controller via SPI. Through the SPI, the MCU can control the CAN transceiver's mode conversion and set the transceiver's message filtering to achieve a specific message wake-up function. See Figure 2 for the connection method.
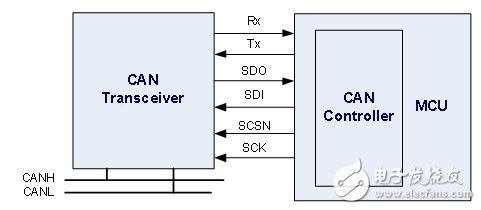
Figure 2 Transceiver Connection Example for PN Support
Software ImplementationIn addition to the need for transceivers that support hardware filtering, in the software section, a set of PN-capable network management protocols also need to be implemented to co-operate with the application to achieve grouped cooperative sleep and wake-up. AUTOSAR has launched AUTOSARR3.2.1, a network management protocol that supports PN. This protocol mainly implements group sleep through specific network management messages.
The CAN network management message format defined in AUTOSAR 3.2.1 is shown in Figure 3. Byte 0 indicates the source node address, and Byte 1 is a fixed format ControlBit Vector. Different bits have special meaning. As shown in FIG. 3, the byte 6 (ParTIal Network Bit) indicates whether the packet is related to the PN. The remaining bytes in the NM packet are User data and can be customized according to user requirements. According to the EE function definition, OEMs can specify different bits in User data to indicate whether different PN groups need to stay awake. For example, when bit 0 of Byte 2 is set as the wake-up indication bit of the PN1 group, if the node wants to keep the PN1 group awake, it needs to be set to 1; if it does not need to keep the PN1 group awake, it is set to 0 or Stop sending network management packets. When all nodes on the network that belong to the same PN1 do not maintain the requirement of awakening, the PN1 group cooperatively enters sleep according to the sleep logic.
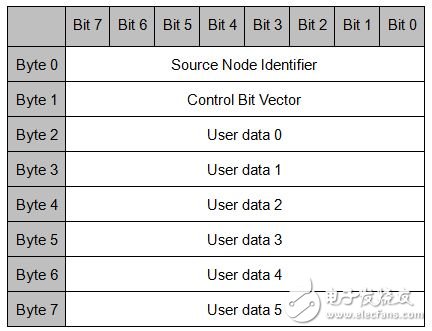
Figure 3 Default network management packet format definition
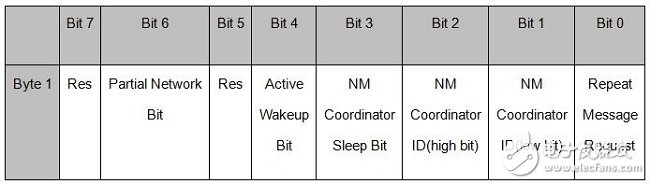
Figure 4 Control Bit Vector Format Definition
Each node only cares about the status of its own PN group. When the network management message sent by the node is added with the PN information (User data), different PN packets can sleep and wake up.
in conclusionThis article introduces the concept and advantages of local network (PN) management, and describes its hardware and software implementation on the CAN bus. It can be seen that as the EE function of automobiles becomes more and more complex, the mechanism of group sleep and wake-up of local network management is an effective method for saving power.
Lifting Hook of various types including Single,2,3 and 4-Hooks Lifting Hook, etc, which is specially used for lifting splited cable or conductors upon the pole or steel tower in electric power line project. It is made of high strength steel with small volume, light weight, no-damage to conductors. By high quality steel material and good design, this kind of Conductor Lifting Device can be durable and long service life. we are a professional Chinese exporter of Lifting Hook and we are looking forward to your cooperation.
Yangzhou Qianyuan Electric Equipment Manufacturing & Trade Co. Ltd is specialized in manufacturing and trade of electric power line transmission tools. Our main products are Anti-twisting Steel Wire Rope,Stringing Pulley,Hydraulic Crimping Compressors,Engine Powered Winch,Motorised Winch,Wire Grip,Gin Pole,Cable Stand,Mesh Sock Grips,Cable Conveyor,Lever Chain Hoists and so on,which are mainly supplied to power companies,railroad companies and other industry fields.
All our products are certified by China National Institute.To assure the quality, we will do 100% inspection for raw material, production procedure, packing before shipment,
so we do have the confidence to supply customers with high-quality and high-efficiency products.
"Customer satisfaction" is our marketing purposes,so we have extensive experience in professional sales force,and strongly good pre-sale, after-sale service to clients. We can completely meet with customers' requirements and cooperate with each other perfectly to win the market.Sincerely welcome customers and friends throughout the world to our company,We strive hard to provide customer with high quality products and best service.
lifting hook, hoisting hook, lifting chain hooks, lifting chains and hooks, chain sling hook
Yangzhou Qianyuan Electric Equipment Manufacturing & Trade Co.Ltd , https://www.qypowerline.com